Anticipating ever increasing issues posed by the usage of Class I UAVs in conflict theaters and civilian environments, a wide range of counter unmanned aerial vehicles (UAVs) radar has been developed over the last years. Common to all of these systems, with the need to detect small and slow targets and potentially within complex environments, is the implementation of lower detection thresholds than conventional airspace surveillance radar. As a result, their capacity to detect small UAVs is indeed improved but it comes along with higher false alarm rates. False alarm regulation becomes then the main concern of all counter UAV radar designers.
As proposed and tested in the previous phase by SET-180 Research Task Group (RTG), implementation in the radar signal processing of classification and Non Cooperative Target Recognition (NCTR) techniques constitute both promising approaches to mitigate this issue. It is within that context that the SET-245 RTG activity was launched in 2016 with a program of work including two aspects.
The first one focused on NCTR algorithms. Hence, based on preliminary results achieved by SET-180 RTG and a review of small UAV radar signature’s characteristics and threat scenarios, Neural Networks (NN) / Deep Learning based UAV recognition methods have been further explored by the SET-245 RTG. This was made possible in particular through the use of large datasets collected during several measurement campaigns. One of the major ones took place in 2017 at the Atlantic Test Range (ATR – Figure 1), in Patuxent River, USA.
 Figure 1: ATR Instrumentation Radar System (courtesy of AFRL) Rotary wing with both carbon fiber and nylon blades and fixed wing
Figure 1: ATR Instrumentation Radar System (courtesy of AFRL) Rotary wing with both carbon fiber and nylon blades and fixed wing
Group I Common Off the Shelf (COTS) small UAVs were flown against L through Ku band radars and the calibrated dataset collected shared among the TG. It is worth noting that having a common database enables the comparison of the NCTR algorithms developed by the RTG (example of results: see Figure 2).
 Figure 2 : Recognition results (courtesy of PIT-Radwar)
Figure 2 : Recognition results (courtesy of PIT-Radwar)
Radar design was the second topic addressed by the RTG. It included not only NCTR algorithms implementation into radar architectures but also investigation of new concepts. This phase was again supported by several experimentations. As an example, the RTG was invited to participate to Black Dart 2018 (DB18). The BD18 trial was conducted in the Muscatatuck Urban Training Complex (MUTC) in Butlerville, Indiana, USA from 8-21 September 2018. This place provided a small urban environment with significant clutter and line of sight challenges. The broader purpose of BD18 was to evaluate combat capabilities against fixed and rotary wing small UAV using radar, E/O and jammer systems. The SET-245 RTG brought 4 systems (Figure 3) ranging from prototype to operational one.

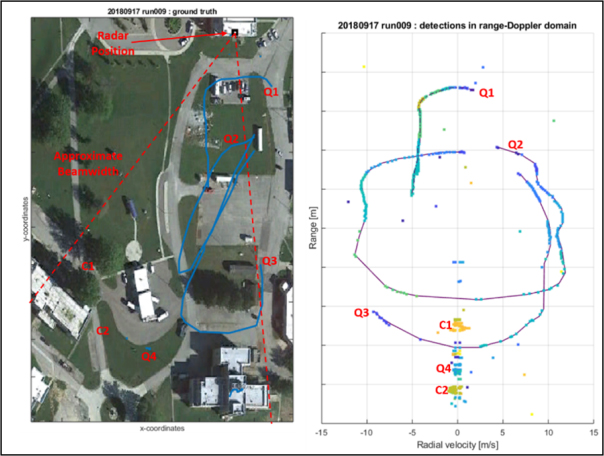
Figure 3 : BD18 experimental setup / preliminary results (courtesy of TNO)
The outcomes of the RTG on both aspects will be made soon available in the final SET-245 Technical Report. It will include a technical agenda for a follow-on activity which shall address topics such as threat assessment which is related to multi UAVs and swarm of UAVS but also multi sensors systems. In this context, it is foreseen to re-schedule a measurement campaign with SET-260 (Assessment of EO/IR Technologies for Detection of Small UAVs in an Urban Environment).